|
Suivi d'une trajectoire |
Problématique : Robotino dispose de nombreux capteurs et il est donc possible de lui faire suivre une trajectoire prédéfinie à partir d'une piste disposée sur le sol. Ce principe est très largement utilisée dans l'industrie (voir ici). Comment doit-on alors commander Robotino une fois le capteur choisi ?
Objectif : écrire l'algorithme qui permet à Robotino de suivre une piste métallique disposée sur le sol en tenant compte des caractéristiques du capteur choisi.
Principe : le choix du capteur est imposé par la nature du matériau à détecter et le type de détection (de contact, de proximité...). Il faut ensuite choisir parmi les capteurs disponibles sur Robotino celui qui conviendrait. L'écriture de l'algorithme doit tenir compte des caractéristiques du capteur et sera d'abord valider dans l'environnement virtuel Robotino® Sim View.
Q5.1.À partir du site suivant "Les capteurs" déterminer quels types de capteurs peuvent convenir pour détecter sans contact une piste métallique (aluminium) ?
Q5.2.A partir de la documentation technique de Robotino déterminer le capteur à utiliser, puis donner la plage de la tension de sortie délivrée par ce capteur.
Q5.3.Des relevés ont été effectués en faisant franchir à Robotino dans le sens de la largeur une bande d'aluminium de 4,8 cm de large et en relevant la tension Ucapt délivrée par le capteur en fonction de la distance parcourue :
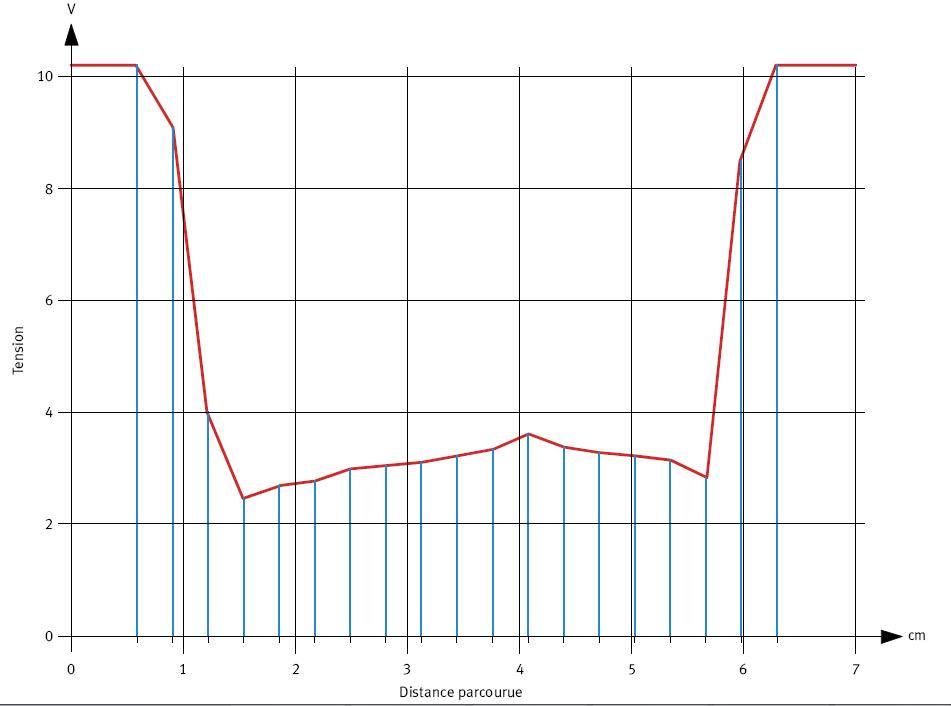
Étudiez l'allure de la courbe obtenue et développez des stratégies possibles pour le suivi de la ligne. Notez vos stratégies. Choisissez une stratégie et justifiez votre choix.
 Appelez le professeur pour valider votre stratégie.
Appelez le professeur pour valider votre stratégie.
Q5.4.On décide de prendre comme référence de tension Uréf = 6 V. Préciser à quoi correspond cette tension.
Q5.5.Nous allons faire appel à une nouvelle fonction afin d'obtenir la tension délivrée par le capteur choisi : analogInput1.Value() . Cette fonction renvoie la tension délivrée par le capteur. Cette valeur sera stockée dans la variable X, puis on calcul l'erreur entre la tension Uréf et Ucapt en faisant l'opération Uréf - Ucapt et l'on stocke le résultat dans la variable error. Écrire un algorigramme qui permette de faire suivre à Robotino la ligne métallique en supposant que le capteur se trouve tout proche du la piste métallique. Vous utiliserez les mots clés suivant : erreur, avance avec rotation à droite, avance avec rotation à gauche et avance sans rotation.
Q5.6.Coder votre algorigramme en Java. Ce code sera inséré dans la fonction inductiveLinefollow() :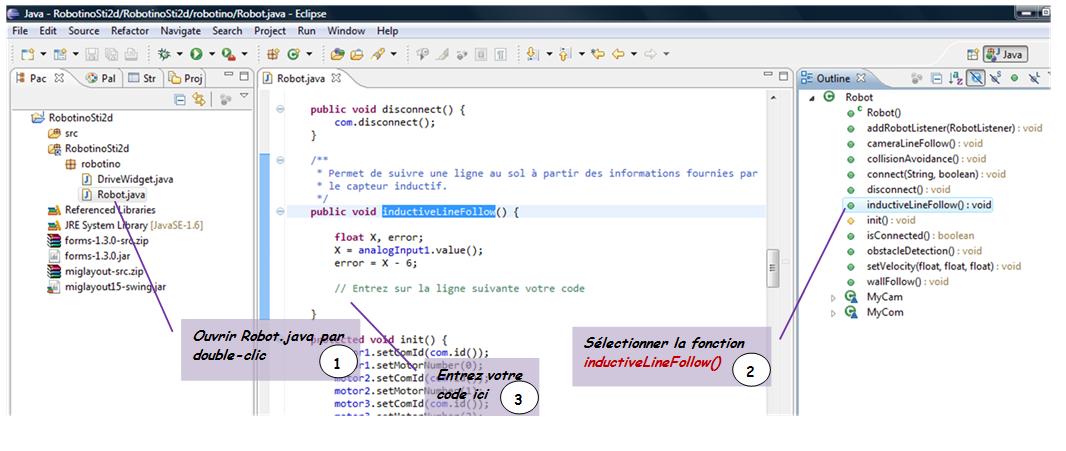
Q5.7.Valider votre code sous Robotino® Sim view. Est-ce que le comportement de Robotino est satisfaisant? Pourquoi?
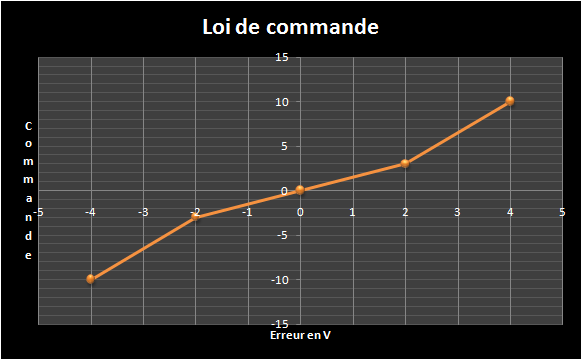
Q5.8.Écrire l'algorigramme correspondant à la loi de commande en rotation de Robotino suivante :
Q5.9. Codez votre algorigramme en Java puis validez-le sous Robotino® Sim view.
Pour représenter les nombres à virgule en Java il faudra utiliser la notation suivante :
|
Notation mathématique |
Notation en Java |
|
3,14159 |
3.14159f |
Q5.10.Valider votre algorithme en conditions réelles.
Créé avec HelpNDoc Personal Edition: Découvrez la puissance et la facilité d'utilisation de HelpNDoc pour la génération de fichiers d'aide CHM