|
Commande avec un microcontrôleur |
III-1 Commande d’un servomoteur à l’aide d’un microcontrôleur
Élaborer le schéma structurel sous ISIS 7 (Proteus 7.10) si vous utilisez un PIC 16F877, sous Proteus 8 si vous utilisez un Arduino Uno.
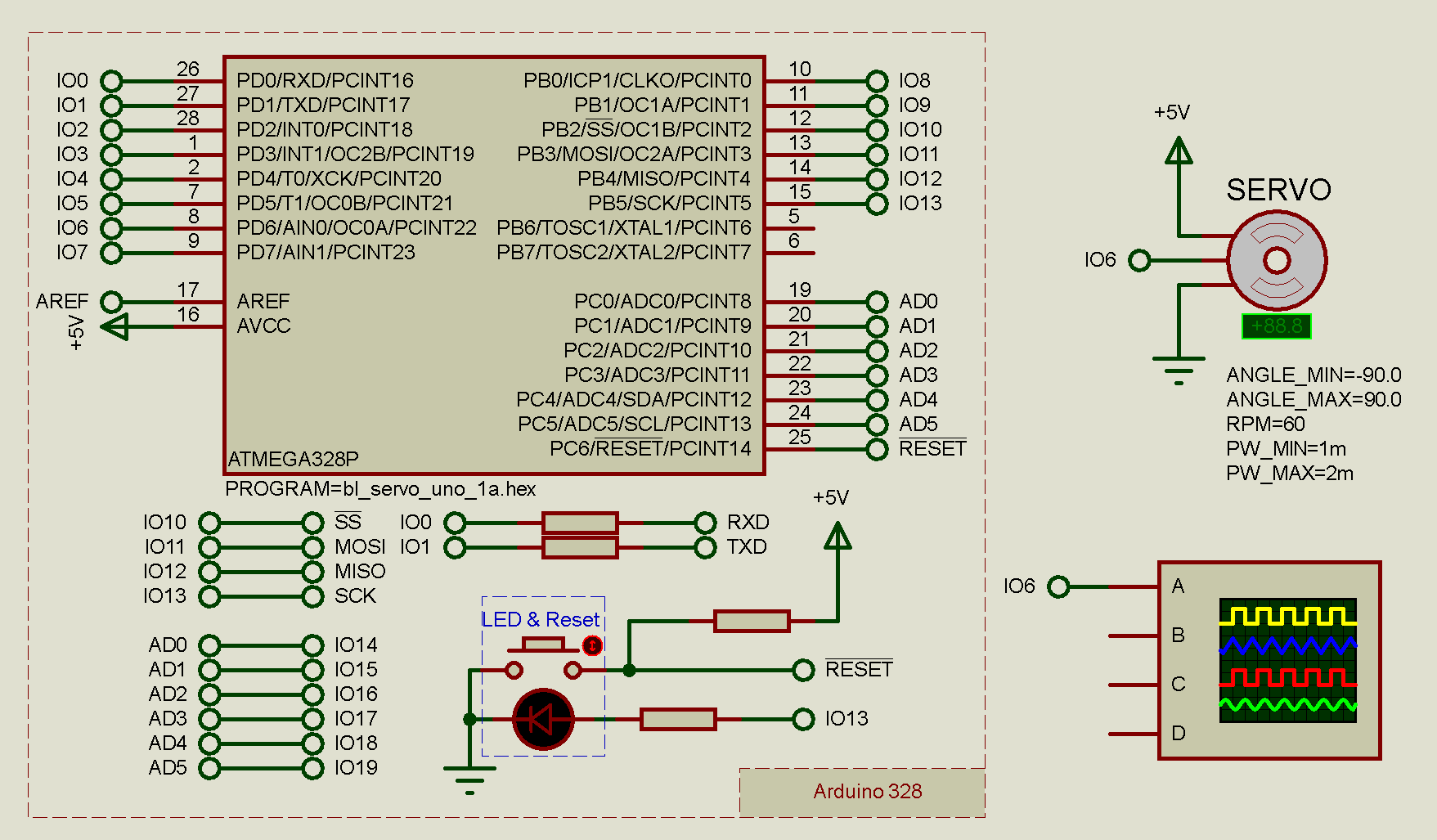
Puis proposez un programme permettant de faire varier la position angulaire du servomoteur de -90° à +90° par pas de 3°.
Faire valider votre simulation avant de câbler et de tester votre montage.
|
|
|
|
Créé avec HelpNDoc Personal Edition: Rationalisez votre processus de documentation avec le modèle HTML5 de HelpNDoc