|
Les Moteurs Pas à Pas |
II - Les moteurs pas à pas
|
|
|
|
Introduction (en image ici)
Le moteur pas à pas fut inventé en 1936 par Marius LAVET, un ingénieur français des Arts et Métiers, pour l'industrie horlogère.
Ces moteurs ont connu ces dernières années, un développement important lié à leurs applications en péri-informatique (imprimantes, unités de disque, lecteur de bande …), en commande numérique et en robotique. Ces applications concernent pratiquement toujours du positionnement en boucle ouverte, c’est-à-dire sans détecteur de position (codeur, résolveur, potentiomètre, etc.).
|
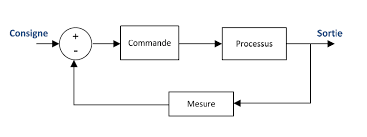
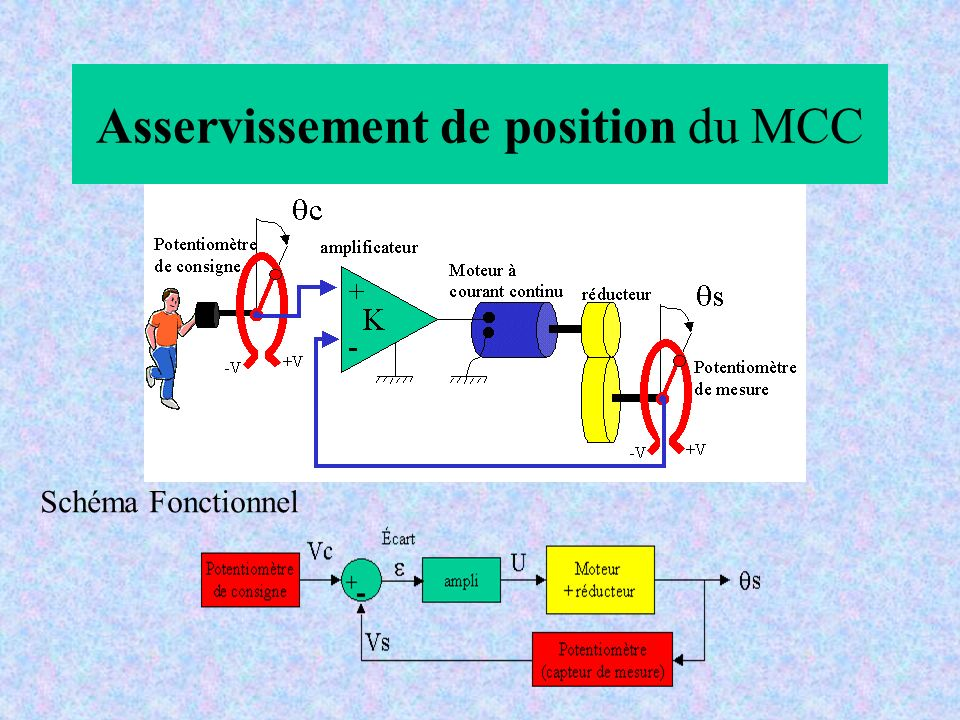
Asservissement de position en boucle fermée, à l'aide d’un moteur à courant continu.
|
|
|
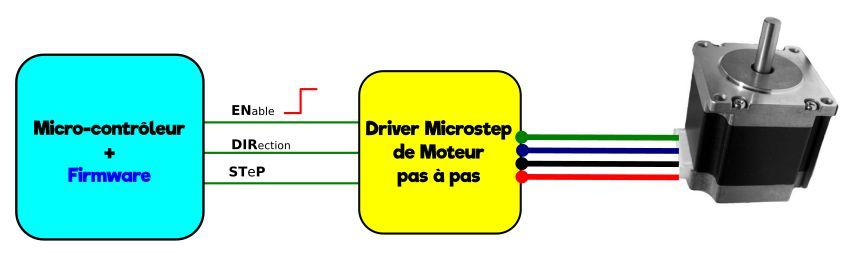
Asservissement de position en boucle ouverte, à l'aide d’un moteur pas à pas. |
|
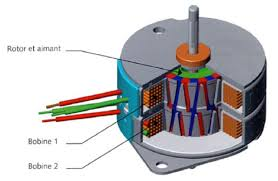
Un moteur pas à pas transforme une impulsion électrique en une énergie mécanique permettant le déplacement angulaire du rotor, appelé " pas ".
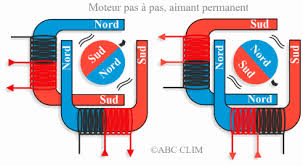
On distingue 3 familles: aimants permanents, réluctance variable, hybrides.
Créé avec HelpNDoc Personal Edition: Transformez votre processus de documentation avec l'analyseur de projet de HelpNDoc