|
Les Servomoteurs |
III- Les Servomoteurs
|
|
|
Les servomoteurs sont des actionneurs. Très utilisés en modélisme et dans l’industrie, ils ont comme caractéristique principale leur « couple », c'est-à-dire la force de rotation qu’ils peuvent exercer. Plus un servomoteur aura de couple et plus il pourra actionner des « membres » lourds comme déplacer un bras qui porte une charge.
|
|
|
|
|


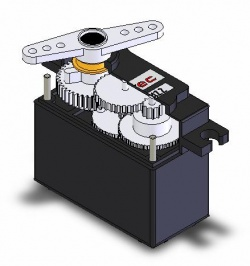
Pour la robotique de loisirs, les servomoteurs ont en général peu de couple et sont de taille réduite, bien adaptée à un encombrement minimal et à une énergie disponible limitée.
|
Les servomoteurs sont pilotés par un fil de commande et alimentés par deux autres fils. Habituellement, ces 3 fils sont rassemblés dans une prise au format standard. Un fil rouge est relié à l’alimentation positive ( +5 ou +6 V selon le servomoteur ), le fil noir est relié à la masse (GND) et le fil jaune est utilisé pour la commande. |
|

Le servomoteur expliqué en image
|
|
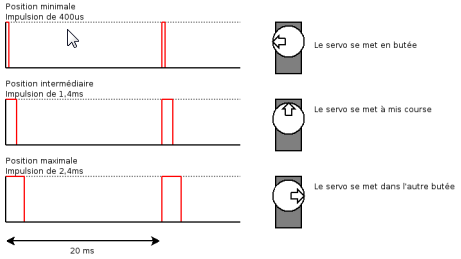
La position d'un servomoteur est contrôlée par un signal logique, où seule compte la durée de l'impulsion au niveau haut. L'impulsion à l'état haut dure de 1ms, pour aller complètement à gauche, à 2ms pour aller en butée à droite. La durée totale entre deux impulsions ne doit pas excéder une vingtaine de millisecondes pour que le servomoteur maintienne sa position de façon stable. |
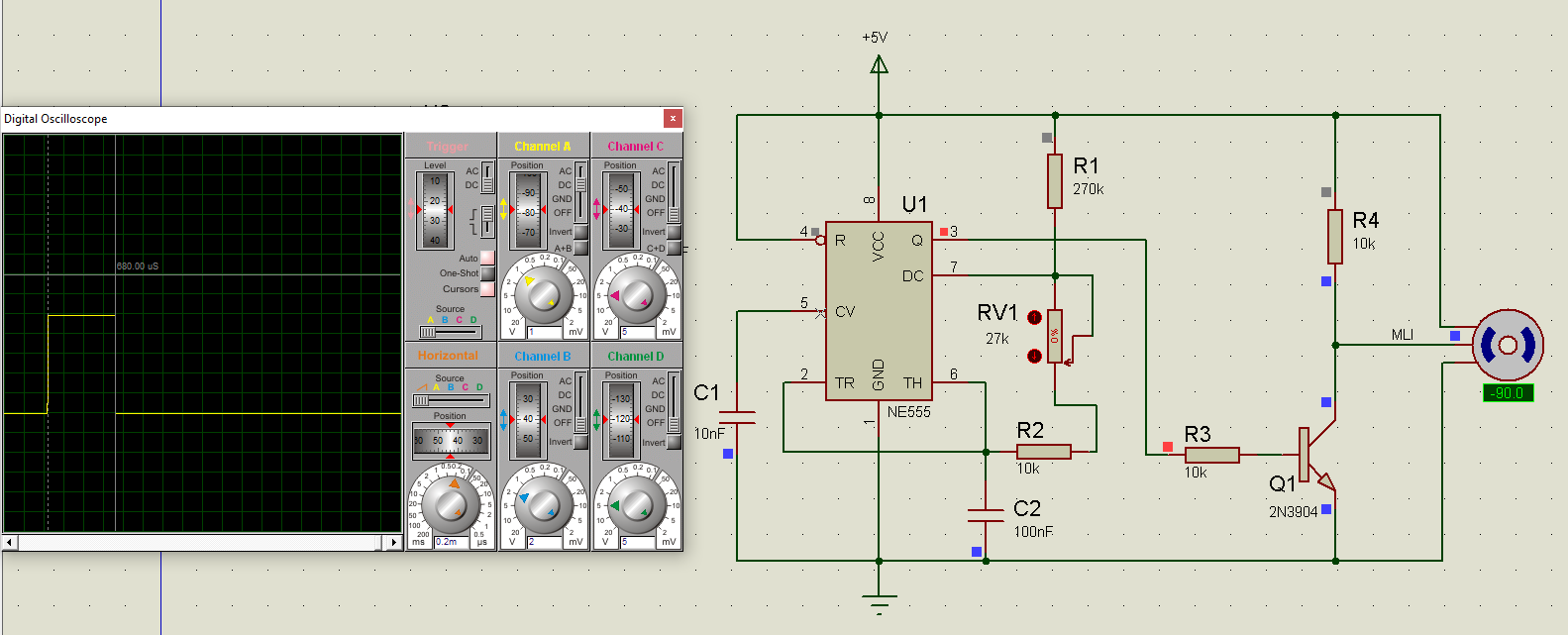
Pour générer ce signal, on peut utiliser un NE555 (ou sa version CMOS) en mode astable, comme le montre le montage suivant qui permet de faire varier la durée d’impulsion à l’aide du potentiomètre (RV1) monté en résistance variable.
|
Tw |
|
|
|
|
|
|
|
|
|
|
Angle |
-90° |
-75° |
-45° |
-30° |
0 |
30° |
45° |
75° |
+90° |
Créé avec HelpNDoc Personal Edition: Créer des documents d'aide PDF facilement