|
Variation de vitesse PWM |
Simulation d’un variateur de vitesse par modulation de la largeur impulsion (MLI)
vidéo : MLI, PWM c’est quoi ?
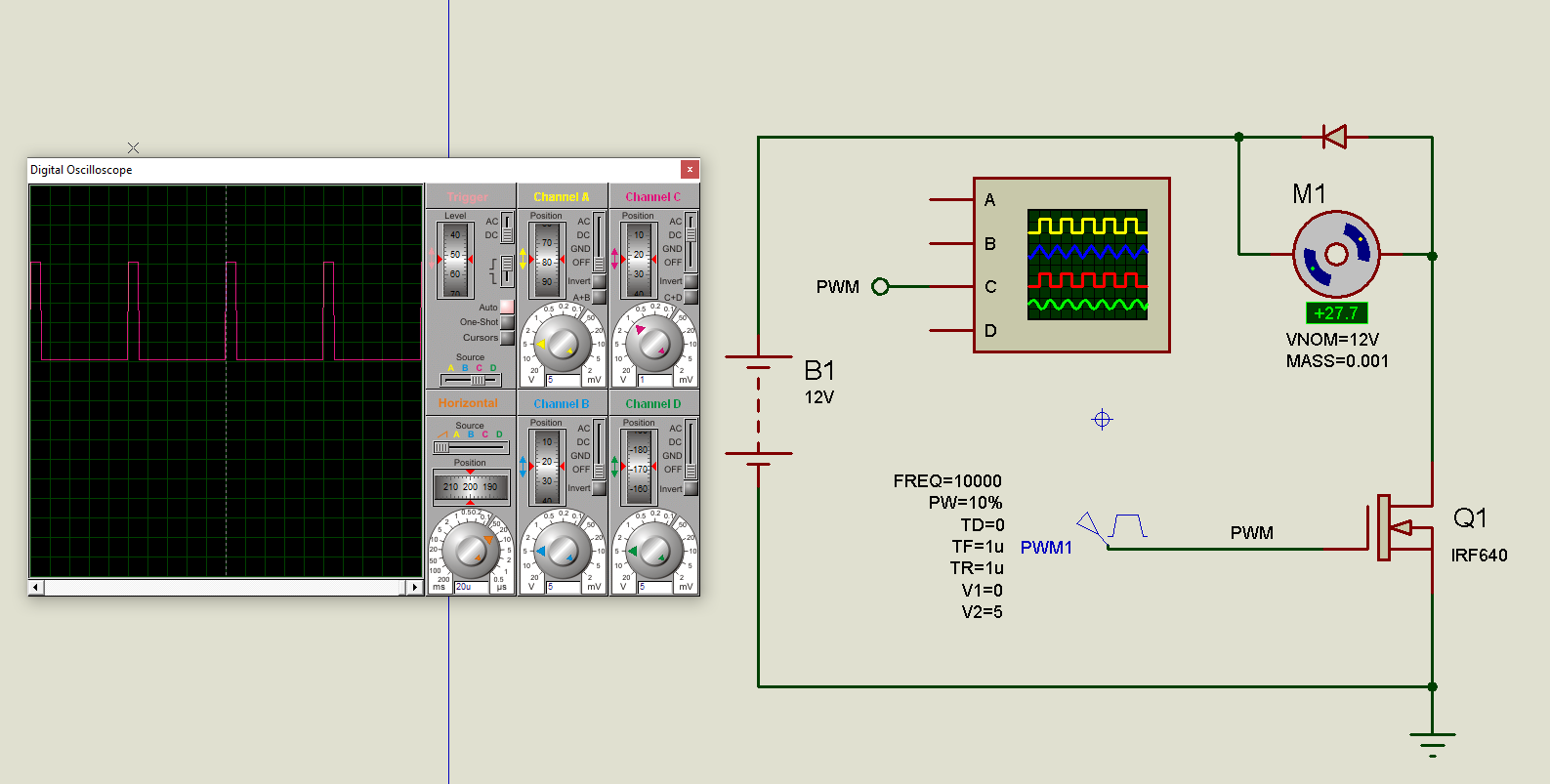
Compléter le tableau ci-dessous en modifiant le rapport cyclique de PWM1
|
Rapport cyclique (PW) |
10% |
30% |
50% |
70% |
90% |
100% |
|
Vitesse Moteur |
|
|
|
|
|
|
Puis tracer la courbe de la Vitesse du moteur en fonction du rapport cyclique.
Vitesse = f ( PW )
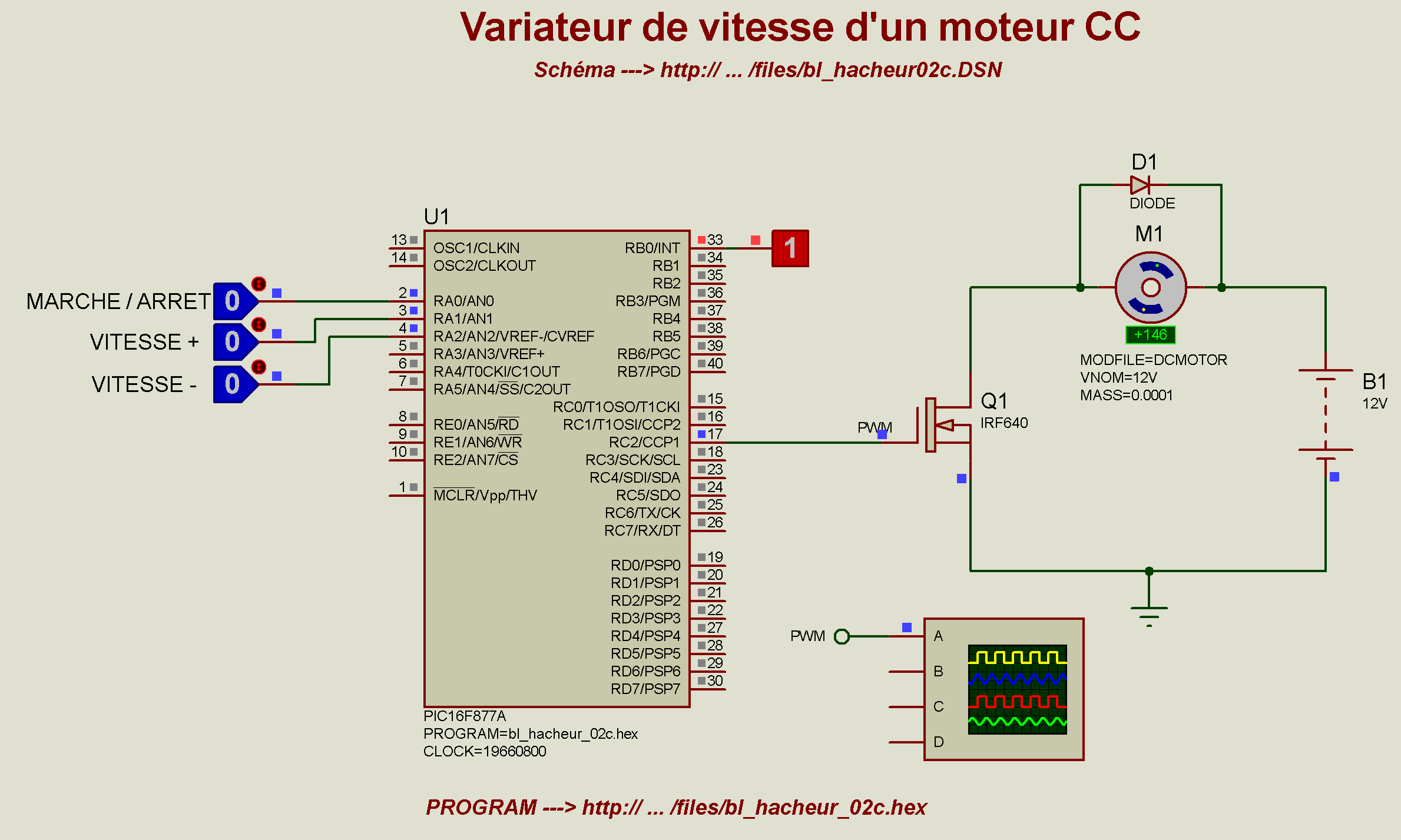
Variation de la vitesse d’un moteur CC à l’aide d’un microcontrôleur ( PIC ou Arduino)
|
|
|
|
Pour ce montage nous utiliserons une sortie PWM (Pulse-width modulation) du microcontrôleur, un transistor MOSFET canal N ( de type IRF640, IFR520N ) ou une carte adaptée ci-contre
|
|
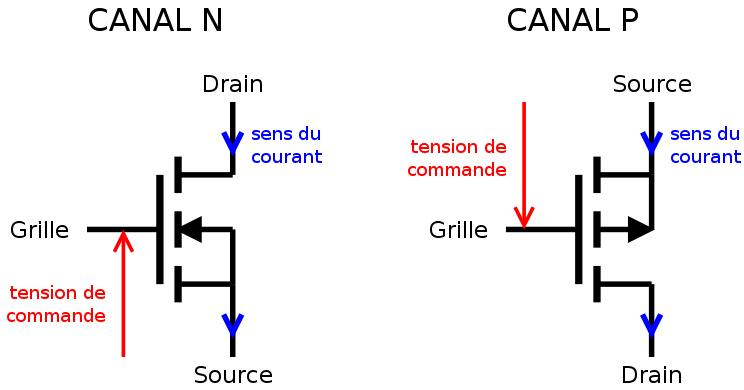
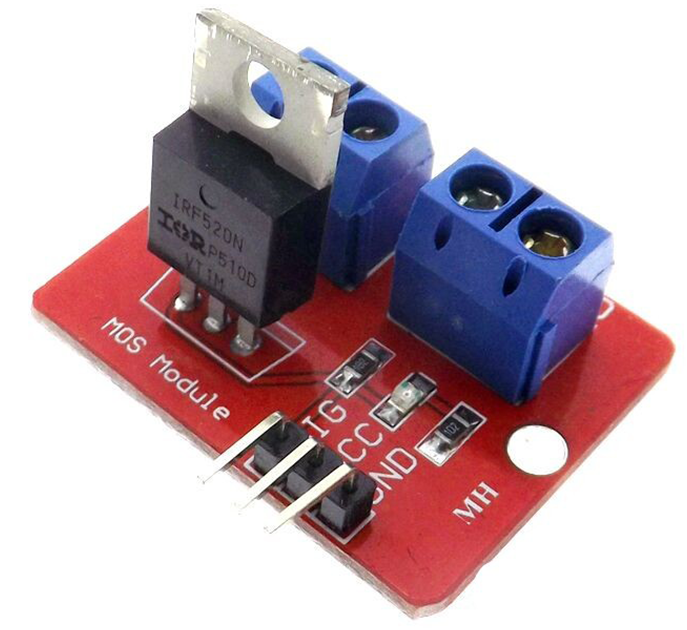
Fonctionnement du transistor MOSFET en images ici.
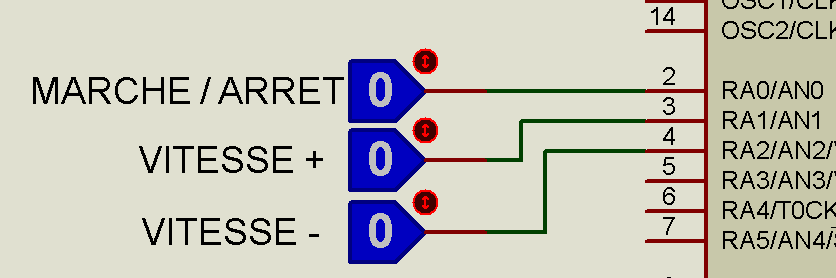
Objectif: Réaliser un programme permettant de faire varier la vitesse d’un moteur à courant continu, le dispositif comporte 3 boutons poussoirs, reliés aux lignes du port A du microcontrôleur PIC (16F877A).
- Le premier, permet la commande Marche / Arrêt du moteur, il est relié au port A0 (RA0)
- Le deuxième, permet d’augmenter la vitesse moteur, il est relié au port A1 (RA1)
- Le troisième, permet de réduire la vitesse moteur, il est relié au port A2 (RA2)
Élaboration du programme sous Flowcode (pour Arduino utiliser Flowcode (Version >8)
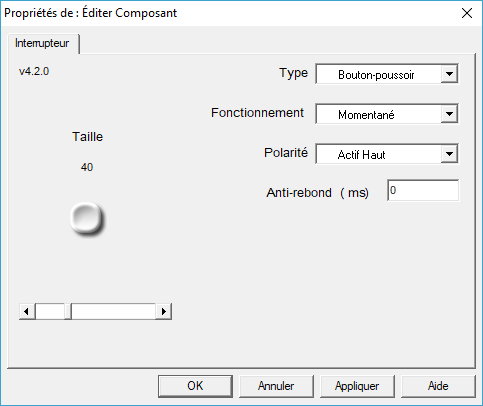
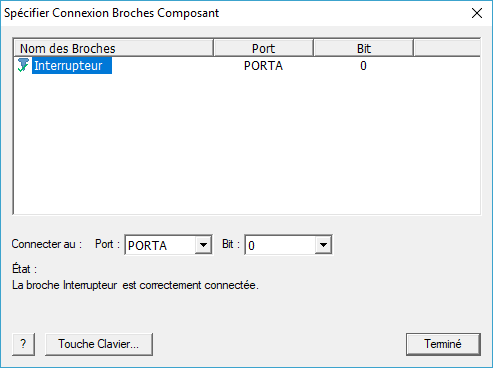
Placer sur le panneau les 3 boutons poussoirs sans oublier de les relier correctement
|
|
|
|
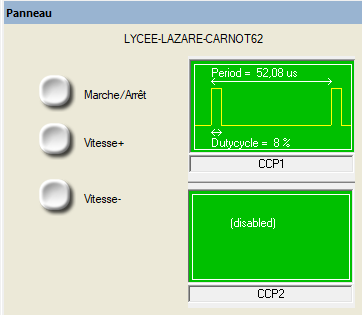
puis le composant PWM.
|
|
|
|
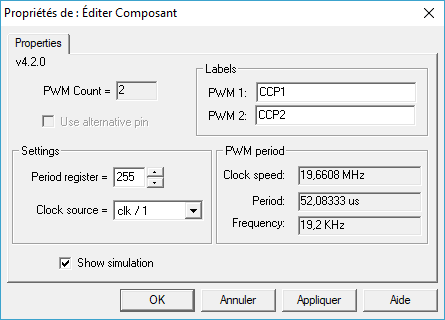
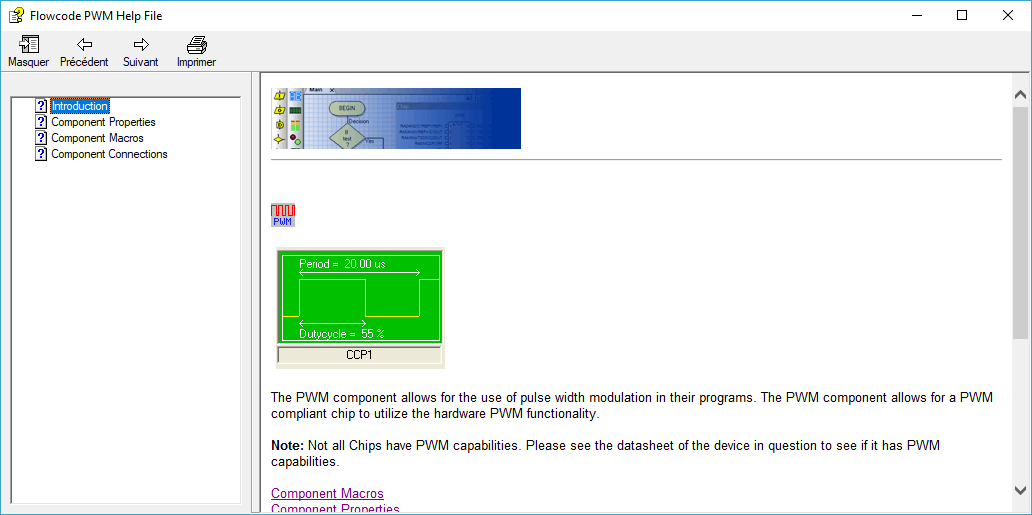
Fonctionnement du composant PWM
Aller dans l’aide du composant, lire l’introduction, les propriétés du composant (Properties) puis les routines du composant PWM (Macros).
Donner alors une traduction des phrases suivantes:
- Enable(Char)
Enables PWM channel (char) and starts it running.
- Disable(Char)
Disables PWM channel (char) and stops it running
- SetDutyCycle(Char1, Char2)
Changes the duty cycle of the PWM channel (char1) and sets it to (char2). The duty cycle is the number of counts that the PWM is on (see Period Register).
- ChangePeriod(Char1, Char2)
Changes the Period value (char1) and the prescaler (char2)
Flowcode PIC – This value represents the clock prescalar value itself, values of 1, 4 or 16 are allowed.
Élaborer votre programme puis simuler sous Isis. Faites valider par le Professeur avant de câbler.
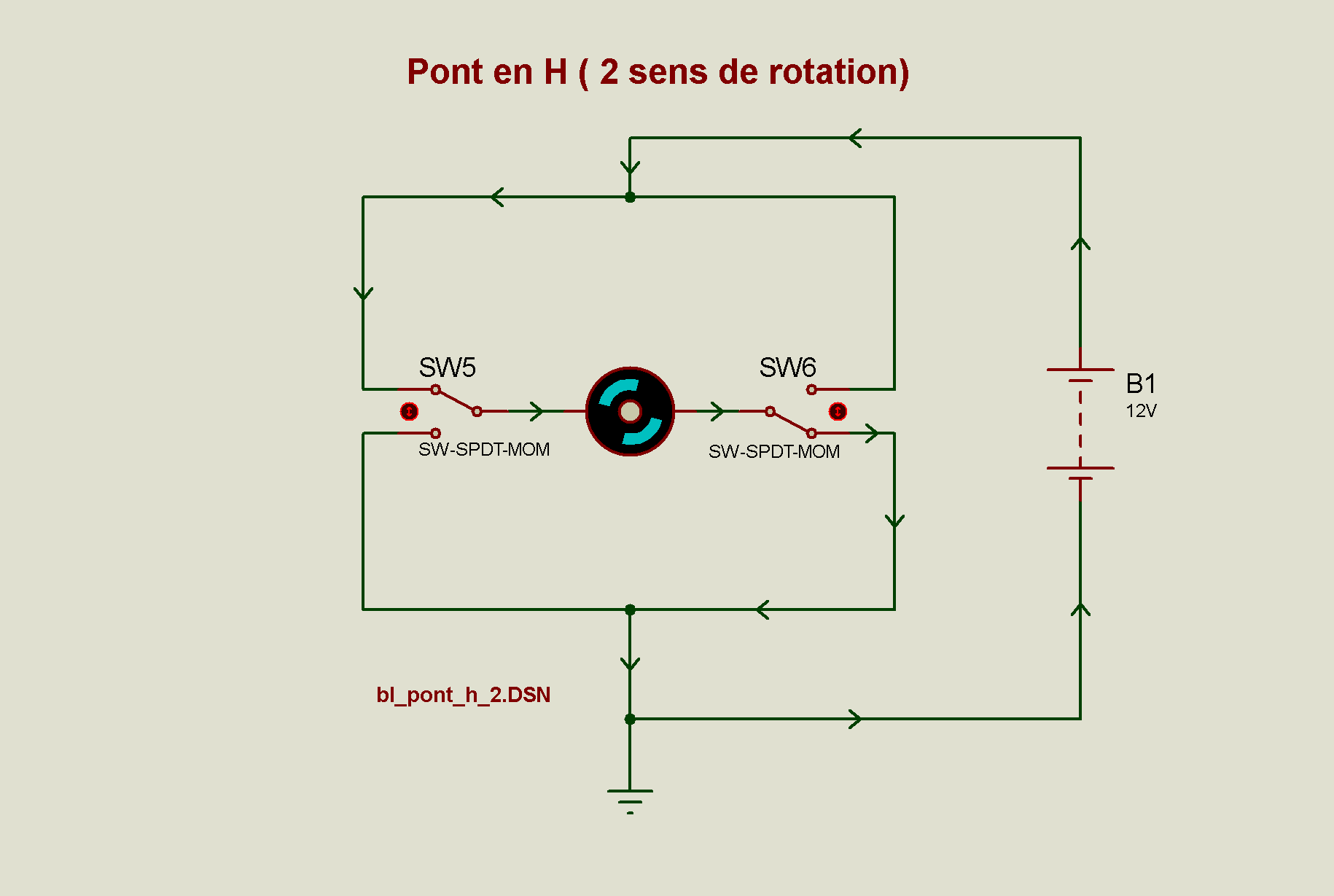
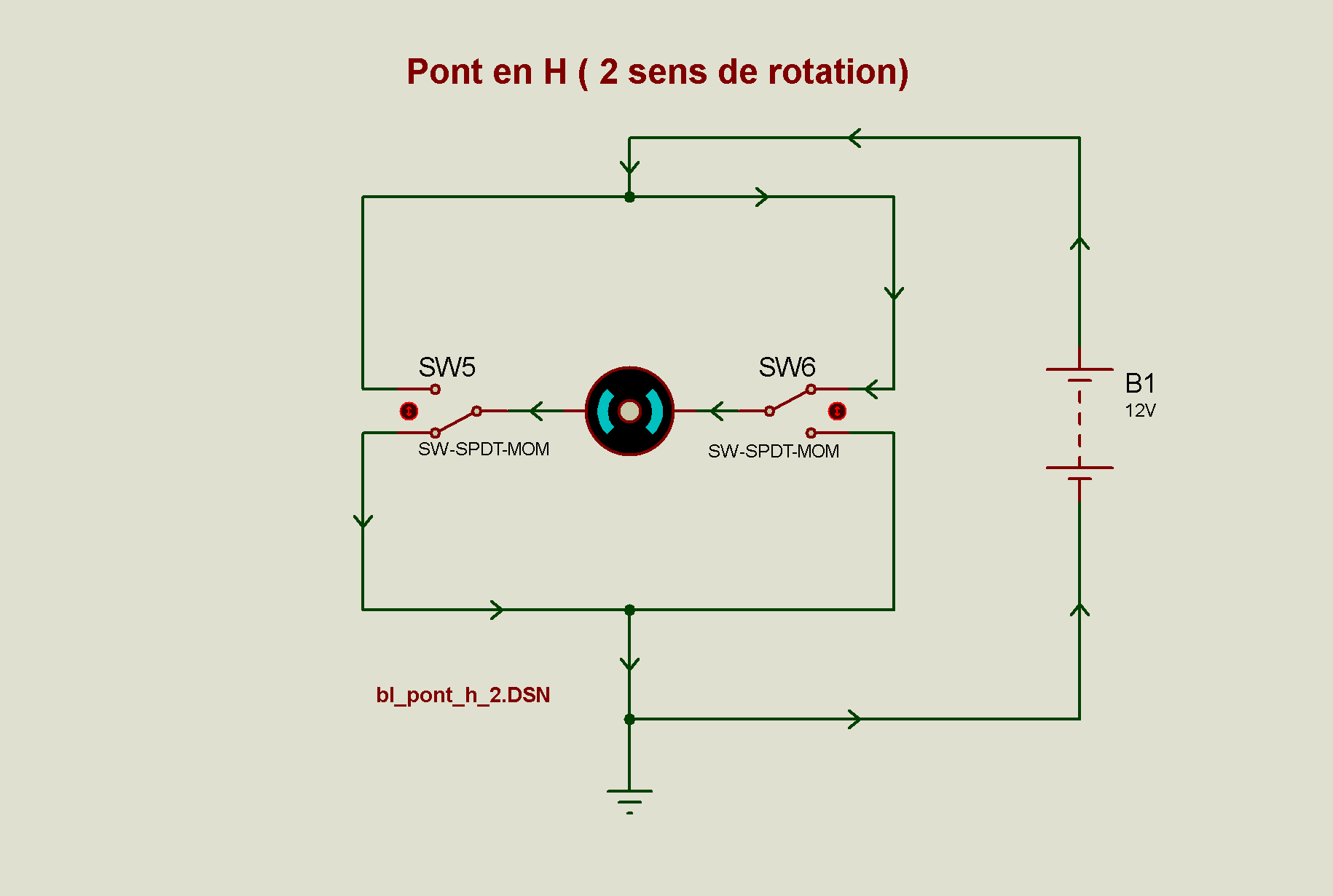
Commande dans les quatre quadrants
Le montage appelé pont en H permet de faire fonctionner la machine dans les 4 quadrants. Donc dans les 2 sens de rotation.
|
|
|
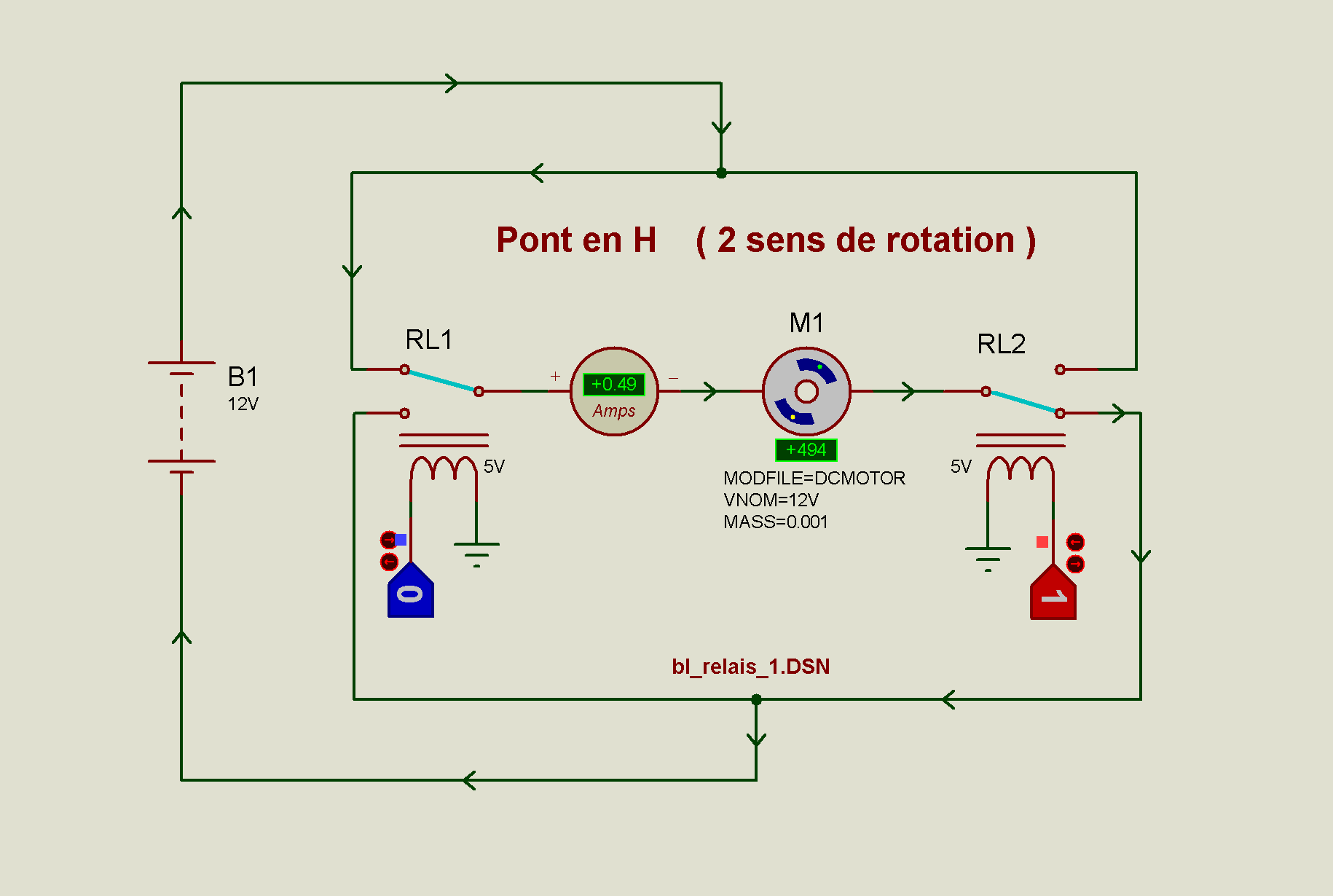
Montage utilisant des relais
|
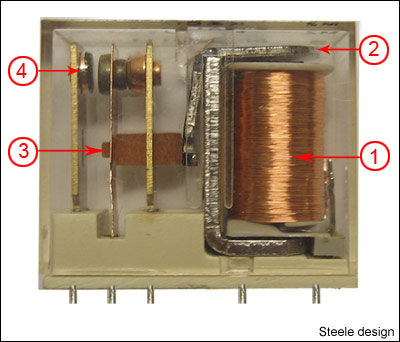
Relais 1 – bobine 2 – partie mécanique 3 – lamelle mobile 4 – lamelle (contact travail) |
|
|
|
|
Une petite vidéo sur le fonctionnement d’un relais ici.
Créé avec HelpNDoc Personal Edition: Rationalisez votre processus de documentation avec l'interface intuitive de HelpNDoc