|
Premier programme |
Objectif : piloter le Robotino dans toutes les directions à partir de l' Interface de Commande Robotino .
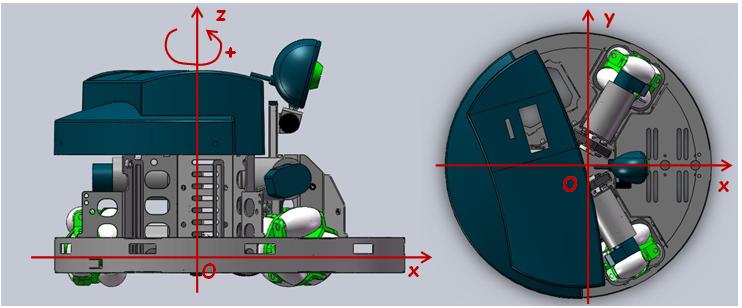
Principe : le réglage de la vitesse de Robotino est réalisé par l'appel de la fonction setVelocity() qui permet de fixer la vitesse linéaire et de rotation du Robotino dans le repère (O; x , y , z) suivant :
Qu'est-ce qu'une fonction ? : une fonction contient une série d'instructions devant être exécutées par l'ordinateur. Toute fonction peut être appelée n'importe où dans un programme. Une fonction peut admettre des paramètres et peut retourner un résultat.
Ex. : la fonction sinus() recoît comme paramètre un réel x et retourne comme résultat un réel y (y = sin(x) ).
Cas de la fonction setVelocity() : setVelocity() ne retourne aucun résultat, par contre elle recoît trois paramètres vx, vy et omega :
•vx : réel qui permet de régler la vitesse linéaire selon l'axe x en mm/s ;
•vy : réel qui permet de régler la vitesse linéaire selon l'axe y en mm/s ;
•omega : réel qui permet de régler la vitesse de rotation selon l'axe z en °/min .
Pour l'instant cette fonction n'est appelée que dans le cas où l'on appuie sur le bouton marche avant ou arrêt.
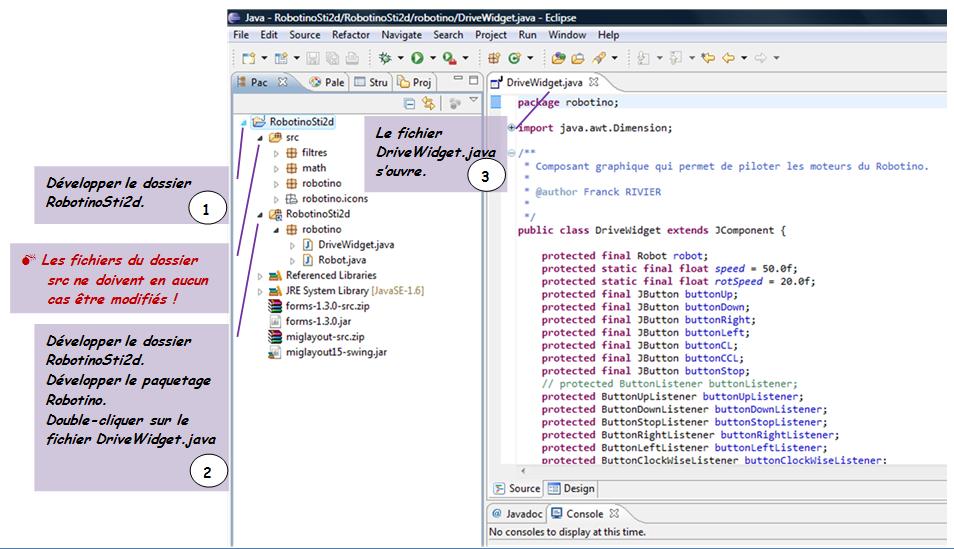
Où est écrit la fonction setVelocity() sous Eclipse ? : procédez comme indiqué :
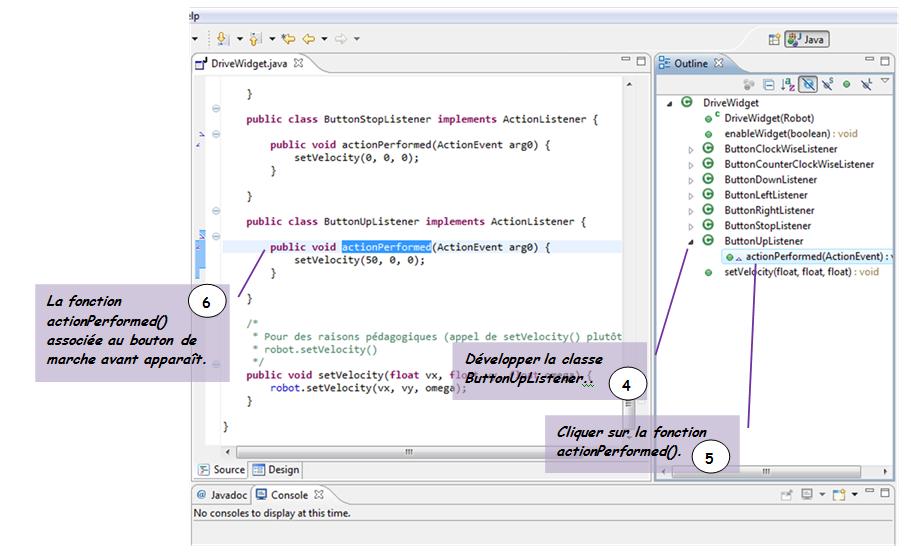
Comment est appelé la fonction setVelocity() ? : lorsque l'utilisateur clique sur l'un des boutons du pavé de commande, cela provoque l'appel d'une fonction particulière actionPerformed(). C'est donc à l'intérieur de cette fonction qu'est placée setVelocity() pour qu'elle soit exécutée juste après le clic sur le bouton. Attention à chaque bouton est associée une fonction actionPerformed() différente. Les conventions de nommage sont les suivantes :
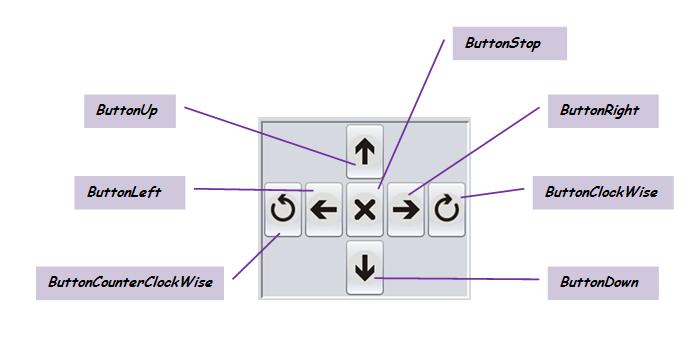
Q2.1.Maintenant à vous de jouer : écrire les différentes fonctions setVelocity(), en choisissant les bonnes valeurs des paramètres vx, vy et omega, afin que tous les boutons du pavé de commande fonctionnent. vx, vy et omega devront respecter les limitations suivantes afin que le Robotino ne se déplace pas trop vite :|vx| ≤ 50 ; |vy| ≤ 50 et |omega| ≤ 20.
Q2.2. Penser à sauvegarder votre travail sous Eclipse avant de lancer l'application. Vérifier le bon fonctionnement de votre programme avec Robotino® Sim Demo.
Q2.3.Appeler le professeur pour vérifier et tester votre programme en conditions réelles en vous connectant à Robotino.
Créé avec HelpNDoc Personal Edition: Transformez votre processus de création de fichier d'aide CHM avec HelpNDoc