Comment NAO arrive à faire tout ça?
NAO arrive à faire tout cela grâce à ces différents composants:
- Deux Caméras pour voir ce qui l'entoure.
- Une centrale inertielle qui lui permet de savoir s'il est debout ou assis.
- Des capteurs tactilles pour détecter vos caresses.
- Quatre micros diréctionnels pour vous entendre.
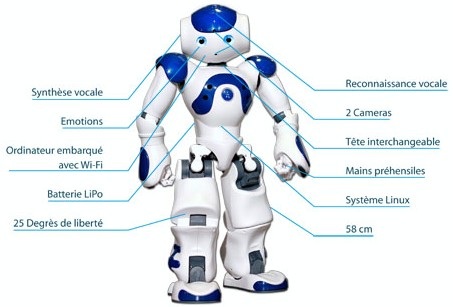
Les principaux éléments sont des moteurs et actionneurs électriques qui lui offrent 25 degrés de liberté (DDL)
Réseau de capteurs:
- 2 caméras.
- 4 microphones diréctionnels.
- 2 émetteurs et récepteurs IR.
- 9 capteurs tactilles.
- 8 capteurs de pression.
- Différents dispositifs de communication incluant synthétiseur vocal, lampes LED et 2 haut-parleurs haute-fidélité.
- Processeur Intel ATOM 1,6 GHz (situé dans la tête) exploitant un noyau Linux et supportant le middleware exclusif d'Aldebaran (NAOqi).
- Batterie de 48,6 Watt-heure conférant à NAO 1,5 heure ou plus d'autonomie, en fonction de l'usage.
- Second CPU (situé dans le torse)
NAO voit en utilisant deux caméras 1220p capables de capturer jusqu'à 30 images par seconde. La première caméra, située dans le front de NAO, balaye l'horizon pendant que la seconde, située au niveau de la bouche, scrute l'environnement immédiat. Le logiciel permet de récupérer les flux photo et vidéo de ce que voit NAO. Les caméras sont utiles qui si l'on peut interpréter ce qu'elles voient.
C'est pourquoi NAO contient un ensemble d'algorithmes de détection et de reconnaissance de visages et de formes. NAO peut reconnaître la personne qui lui parle ou trouver un ballon, voire des objets plus complexes.
Ces algorithmes ont été spécialement développés en cherchant toujours à utiliser un minimum de ressources processeur.
En outre, le kit de développement logiciel de NAO vous permet de développer vos propres modules pour les interfacé avec OpenCV (bibliothèque de modules de vision informatique Open Source qu'a développée a l'origine par Intel).
Comme vous pouvez exécuter des modules sur NAO ou les transférer sur un PC relié a NAO, vous pouvez facilement utiliser les fonctions d'affichage OpenCV pour développer et tester vos algorithmes en utilisant l'image en retour.
NAO utilise quatre microphones diréctionnels pour détecter les sons et ses capacités de reconnaissance vocale et de synthèse vocale de texte lui permettent de communiquer en 19 langues.
Caractéristiques techniques :
| Hauteur | 58 cm2 |
| Masse | 4.8kg |
| Degrès de Libertés | 14 à 25 degrès |
| Autonomie | 90 min |
| Processeur | Intel Atom 1,6 GHz (V4) ou AMD Geode 550 MHz (V3.3 ...) |
| Système d'exploitation intégré | Linux |
| Systèmes d'exploitation compatibles | Windows, Mac OS, Linux |
| Langages de programmation | C++, Python, Java, MATLAB, Urbi, C, .Net |
| Connectivité | Ethernet, Wi-Fi (b, g, n ) |
| Vision | 2 caméras 920p, 30 ips |
| Audio | 4 Microphones |