Le programme de test :
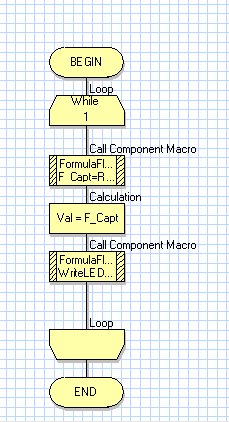 -Lecture du capteur choisi, ici c'est le capteur avant
-Conversion de la valeur de retour et stockage dans une nouvelle variable
-Écriture de la valeur gràce aux leds disposées sur le robot
-Lecture du capteur choisi, ici c'est le capteur avant
-Conversion de la valeur de retour et stockage dans une nouvelle variable
-Écriture de la valeur gràce aux leds disposées sur le robot
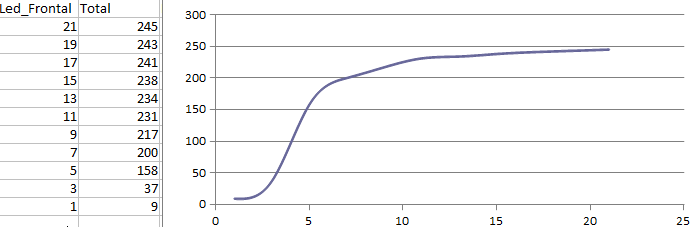
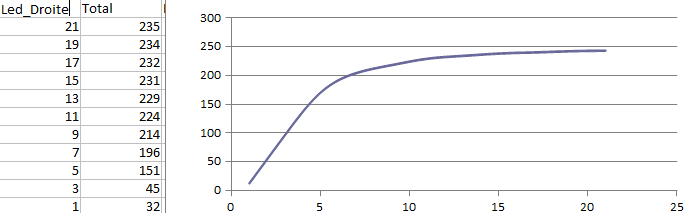
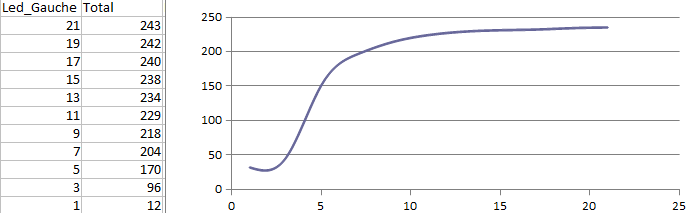
Par la suite nous avons donc regrouper nos valeurs dans un tableau, puis nous avons effectuer un graphique pour chaque capteurs. Nous avons donc utilisé ces graphiques pour programmé le robot. Voici les resultats :