|
|
Le programme est composé de plusieurs macros. Chaque macro est la solution à un cas possible vu précédemment :
Cas possibles
Mise à jour des capteurs
Demi-tour
Tourner à droite
Tourner à gauche
Tout droit
Principal
Cas possibles
 -Lecture de la variable du capteur avant, si la valeur est plus petite que 150, on incrémente de 4 la variable cas et on allume la led 4 sinon on éteint la led 4.
-Lecture de la variable du capteur droit, si la valeur est plus petite que 140, on incrémente de 1 la variable cas et on allume la led 0 sinon on éteint la led 0.
-Lecture de la variable du capteur gauche, si la valeur est plus petite que 160, on incrément de 2 la variable cas et on allume la led 7 sinon on éteint la led 7.
-Lecture de la variable du capteur avant, si la valeur est plus petite que 150, on incrémente de 4 la variable cas et on allume la led 4 sinon on éteint la led 4.
-Lecture de la variable du capteur droit, si la valeur est plus petite que 140, on incrémente de 1 la variable cas et on allume la led 0 sinon on éteint la led 0.
-Lecture de la variable du capteur gauche, si la valeur est plus petite que 160, on incrément de 2 la variable cas et on allume la led 7 sinon on éteint la led 7.
Mise à jour des capteurs
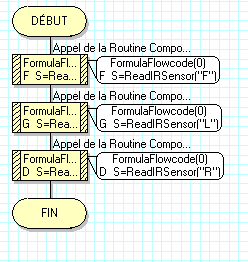 -Lecture des capteur avant(Front), gauche(Left) et droit(Right) puis stockage des valeurs dans des variables.
-Lecture des capteur avant(Front), gauche(Left) et droit(Right) puis stockage des valeurs dans des variables.
Demi-tour
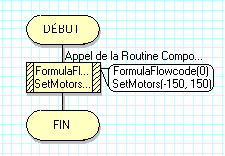 La commande SetMotors permet de faire avancer, tourner ou reculer le robot.
Ici, le robot fait un demi-tour en inversant le sens de rotation d'une des deux roues.
La commande SetMotors permet de faire avancer, tourner ou reculer le robot.
Ici, le robot fait un demi-tour en inversant le sens de rotation d'une des deux roues.
Tourner à droite
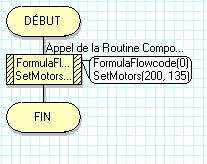 En ralentissant le moteur de droite, le Formula flowcode va tourner à droite.
En ralentissant le moteur de droite, le Formula flowcode va tourner à droite.
Tourner à gauche
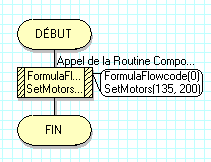 En ralentissant la vitesse du moteur de gauche, le robot va tourner à gauche.
En ralentissant la vitesse du moteur de gauche, le robot va tourner à gauche.
Tout droit
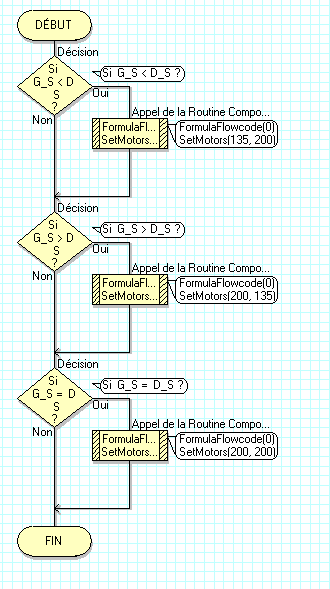 Chaque décision définit si oui ou non le robot doit se replacer :
-Si le robot est près du mur gauche alors il va légérement dévier vers la droite et inversement(Gauche_S < Droit_S ou Gauche_S > Droit_S).
-Si il est aussi près du mur gauche que du mur droit alors il continu tout droit (Gauche_S = Droit_S).
Chaque décision définit si oui ou non le robot doit se replacer :
-Si le robot est près du mur gauche alors il va légérement dévier vers la droite et inversement(Gauche_S < Droit_S ou Gauche_S > Droit_S).
-Si il est aussi près du mur gauche que du mur droit alors il continu tout droit (Gauche_S = Droit_S).
Principal
 -Appel de la macro Mise à jour des capteurs
-Appel de la macro Cas possibles
-Multi-décision définissant la procédure à suivre suivant le tableau effectuer auparavant(tout droit, tourner à gauche, à droite ou demi tour)
-Appel de la macro Mise à jour des capteurs
-Appel de la macro Cas possibles
-Multi-décision définissant la procédure à suivre suivant le tableau effectuer auparavant(tout droit, tourner à gauche, à droite ou demi tour)
Résultats
|
